学习缘由:FlashAttention是基于cute来实现的,所以要补一下cute方面的知识,来自 FlashAttention v2核心代码解析(一)- 知乎
学习顺序:
1 cute 之 Layout - 知乎
引入了有层次的描述Layout来处理逻辑坐标和物理坐标的映射关系,包含shape和stride两部分
- shape描述分块层次和结构
- stride描述块内或块间的连续性,是间隔量
块内和块间都是Tensor,实现了Tensor套Tensor,这就是有层级的Tensor,而其坐标到实际物理位置的映射关系则就是其Layout
【例】二维空间下逻辑空间和物理空间的表示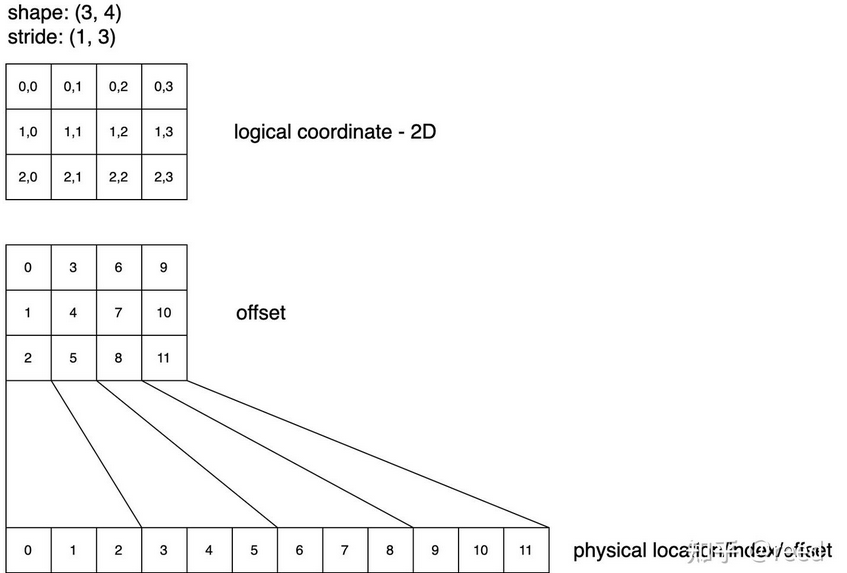
shape: (3, 4), stride: (1, 3)
- shape就是矩阵的行数和列数
- stride的1表示沿着矩阵的行方向的元素,在物理空间时相对上一个元素(相邻行)加1,3表示沿着矩阵的列方向的元素,在物理空间时相对上一个元素(相邻列)加3
逻辑空间映射到物理空间:
$index_{physical}=coordinate * stride =\sum_i coordinate_i · stride_i$
【例】两个层级的Tensor
shape: ((2, 2), (2, 4))
- (2, 2)表示内层Tensor行数、外层Tensor行数
- (2, 4)表示内层Tensor列数、外层Tensor列数
stride: ((1, 4), (2, 8)) - (1, 4)表示内层Tensor行方向间隔、外层Tensor行方向间隔
- (2, 8)表示内层Tensor列方向间隔、外层Tensor列方向间隔
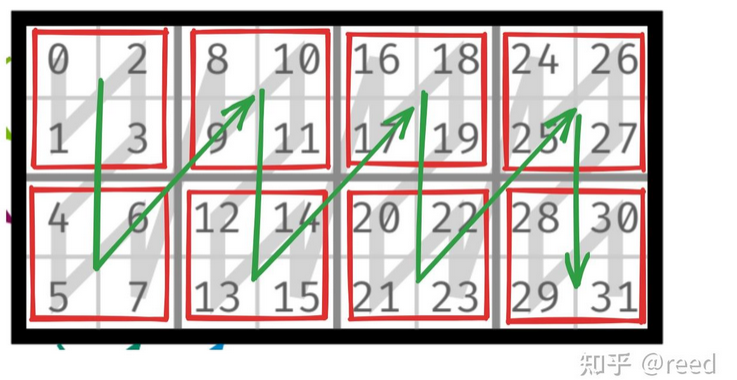
此时引入两个概念:coord和index(或者叫value、offset) - coord表示数据在Tensor的相对位置,顺序按列主序
- index表示数据在内存上的位置
具体的在cute实现时,其提供了make_shape和make_stride接口,shape和stride可以区分为常量shape和变量shape
- 常量shape:在编译时就完成坐标的映射或推导,减少运行时的计算量,编译期整数
auto shape = make_shape(Int<2>{}, Int<3>{}); auto shape1 = make_shape(shape, Int<3>{}); # shape1代表一个1维的Grid,这个Grid里有3个元素,而每个元素都是一个(2, 3)的Tile - 变量shape:在运行时决定,运行时整数
auto shape = make_shape(2, 3); auto shape = make_shape(m, n); # 2,3虽然是常数,但是在cute的约定里,该形式表示变量 auto tensor_stride = make_stride(make_stride(1,4), make_stride(2,8));
2 cute Layout 的代数和几何解释
这个Layout的代数运算,做乘法、除法、复合函数,作用是什么?
- 乘法:将维度组合,LayoutA作为外层循环,LayoutB作为内层循环,构建高维tensor,一维内存模拟多维数据,访问更方便
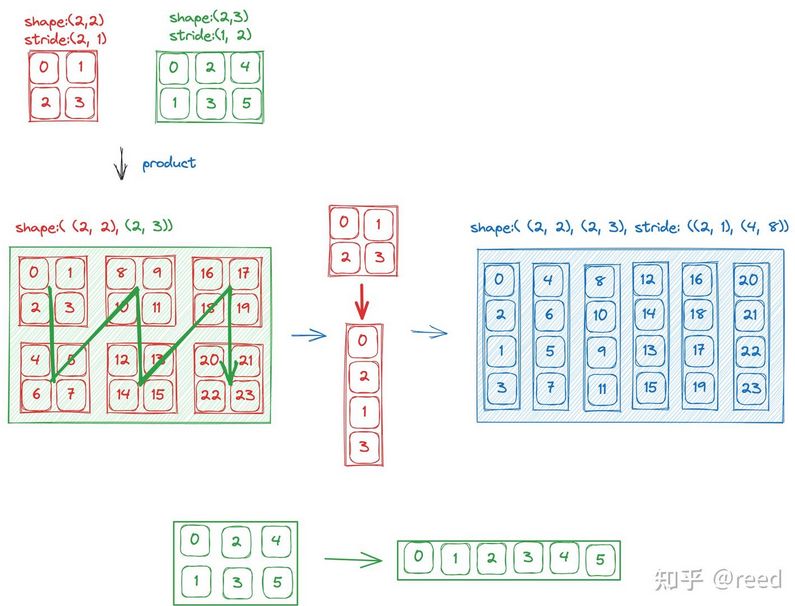
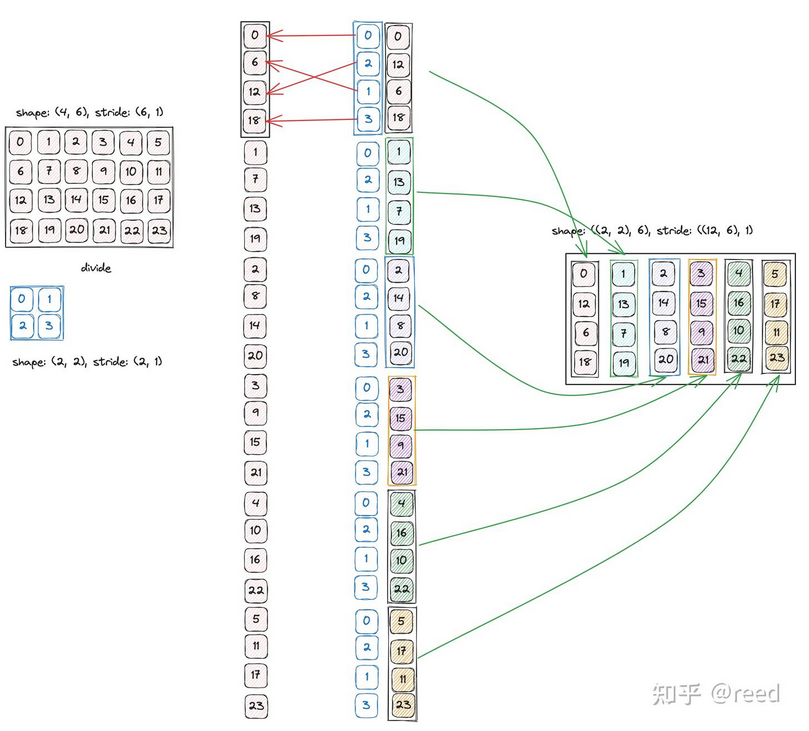
- 除法:LayoutA÷LayoutB,对A的分块,对A的访问通过内层和外层两个维度,便于并行
- 复合函数:数据在共享内存里是行优先排序A,但是Tensor Core规定了某种顺序B来读取顺序,这个顺序下的offset=A(B(x)),B输出偏移量,作为A的逻辑坐标输入(默认是列优先),最终得到对应的数据的物理内存排序
- B:shape$(M_B, N_B)=(2,2)$stride$(m_B, n_B)=(1,5)$
- A:shape$(M_A, N_A)=(4,4)$stride$(m_A, n_A)=(4,1)$
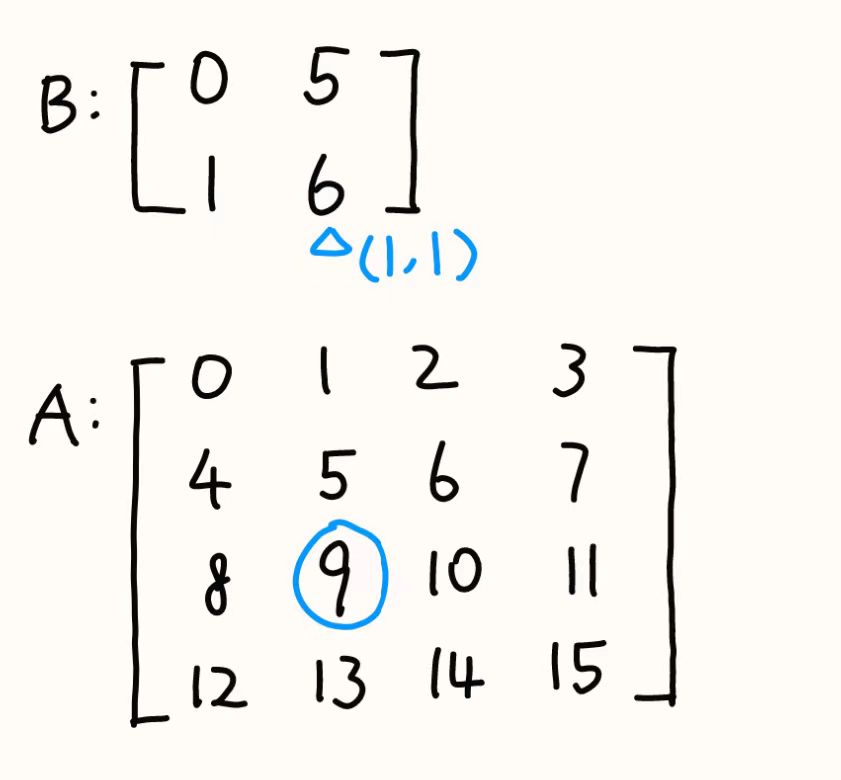
- 目的:访问B窗口下的某个元素$(i_B, j_B)=(1,1)$
- 计算该元素在B下的偏移量:$Offset_B=i_Bm_B+j_Bn_B=1×1+1×5=6$
- 将该偏移量按列优先转换为A的坐标输入:$i_A=Offset_B\% M_A=6\%4=2$、$j_A=Offset_B/ M_A=6/4=1$
- 再计算A下的偏移量:$Offset_A=i_Am_A+j_An_A=2×4+1×1=9$,9就是对应的内存位置
- 整个过程的理解:用户去仓库B拿东西$(i_B, j_B)=(1,1)$,要的是索引为$6$的东西,仓库A要接收二维坐标执行,只能先按列优先(线性索引转二维网格的规则)来找对应的编号,找到的是$(i_A, j_A)=(2,1)$,但是这个是逻辑排布,物理排布需要根据A的stride得到,最后计算是9
- 逆:在复合函数$(A◦B)(x)=A(B(x))$的基础上再加上单位函数$id_X(x)=x$的定义,就能得到逆的定义$A(B(x))=x$,所谓逆,就是数值上LayoutB的一维坐标=LayoutA的offset,消除特性排布B的乱序影响,使得线程能够以线性的方式在A里访问数据。
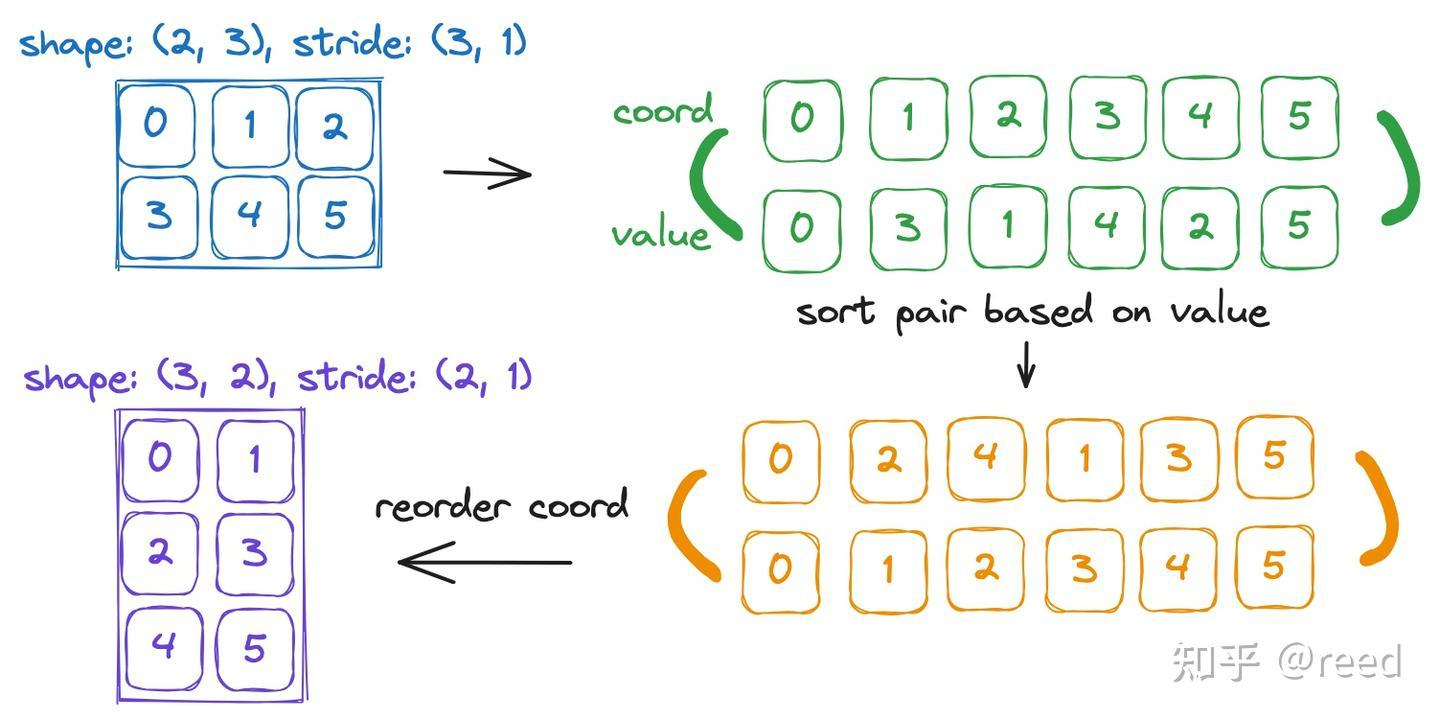
- 注:橙色上排为value(即offset),下排为coord(即逻辑索引)
3 cute之MMA
Tensor Core是专门实现小块矩阵乘法$D=A×B+C$的硬件单元,相比CUDA Core,虽然功能单一,但是速度极快。
- 在不同架构,Tensor Core数据存放位置不一样:
- V、T、A架构,输入输出数据都在和CUDA Core共享的寄存器里
- H架构,输入数据在SMEM里
- Tensor Core的使用形式有两种:
- 在cublas和cudnn,封装成矩阵计算的函数,以SDK的形式使用
- NVCC提供wmma和mma来实现
- wmma:使用API,传参,不需要关心寄存器怎么分配,就能触发Tensor Core,如果数据布局不匹配就不能使用
- mma:自己写指令,数据面向寄存器表示,用户手动管理线程和寄存器
cute是面向mma实现的(管理底层mma.sync汇编指令),对于矩阵计算类任务,cute提供了mma的抽象来描述计算和数据的逻辑结构:MMAOperation、MMA_Traits、MMA_Atom、TiledMMA、ThrMMA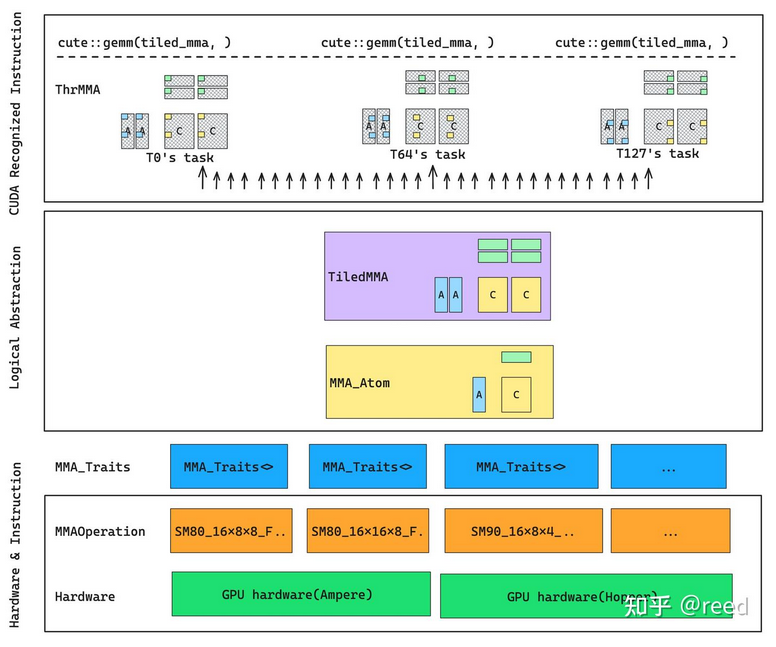 从下往上
从下往上
- 硬件层
- MMAOperation,针对不同GPU架构提供不同的指令封装
- MMA_Traits,是编译期的信息库,输入数据类型(MMAOperation的指令),输出多个属性
- MMA_Atom,最小的矩阵乘法单元,MMAOperation和MMA_Traits分别提供指令和指令属性
- TiledMMA,由多个MMA_Atom组成,实现(多个warp)并行和(同一个线程)重复执行的操作,能处理更大的数据
- ThrMMA,是TiledMMA在具体某个线程上的投影,描述每个线程在干什么活
- cute::gemm,每个线程调用这个函数,是顶端函数调用
3.1 MMAOperation
cute为每一条mma.sync指令()都创建了一个相应的Operation结构体,只定义输入和输出:
- 结构体名称:架构_MNK_DABC_AB布局(T:row-major,N:col-major)
- 设定A、B、C、D操作数的数据类型,包括寄存器类型和数据量,每个线程负责4+2+2+4个32位寄存器到PTX instruction
fma作为C++接口,内联汇编(在高级语言直接嵌入低级汇编语言),cute的TiledMMA可以直接调用来执行计算struct SM70_8x8x4_F16F16F16F16_TN { using DRegisters = uint32_t[4]; using ARegisters = uint32_t[2]; using BRegisters = uint32_t[2]; using CRegisters = uint32_t[4]; // Register asm fma CUTE_HOST_DEVICE static void fma(uint32_t & d0, uint32_t & d1, uint32_t & d2, uint32_t & d3, uint32_t const& a0, uint32_t const& a1, uint32_t const& b0, uint32_t const& b1, uint32_t const& c0, uint32_t const& c1, uint32_t const& c2, uint32_t const& c3) { #if defined(CUTE_ARCH_MMA_SM70_ENABLED) asm volatile("mma.sync.aligned.m8n8k4.row.col.f16.f16.f16.f16" "{%0, %1, %2, %3}," "{%4, %5}," "{%6, %7}," "{%8, %9, %10, %11};\n" : "=r"(d0), "=r"(d1), "=r"(d2), "=r"(d3) : "r"(a0), "r"(a1), "r"(b0), "r"(b1), "r"(c0), "r"(c1), "r"(c2), "r"(c3)); #else CUTE_INVALID_CONTROL_PATH("Attempting to use SM70_8x8x4_F16F16F16F16_TN without CUTE_ARCH_MMA_SM70_ENABLED"); #endif } };
3.2 MMA_Traits
根据MMAOperation输入的数据类型,定义相关的类型或值提供MMA_Atom使用
ValTypeX:数据在加载到寄存器后的逻辑类型,即便上面提到的A、B是用uint32_t的寄存器,他们的物理类型是uint32_t,但ValType会被定义成他们的逻辑类型half_tThrID:单个操作使用的线程个数- warp:32线程
- quadpair:8线程,Volta架构
- warpgroup:hopper架构
XLyout和_NT不一样 (【问题】只是个封装名,给BLAS看的?)template <> struct MMA_Traits<SM70_8x8x4_F32F16F16F32_NT> { using ValTypeD = float; using ValTypeA = half_t; using ValTypeB = half_t; using ValTypeC = float; using Shape_MNK = Shape<_8,_8,_4>; using ThrID = SM70_QuadPair; using ALayout = SM70_8x4_Row; using BLayout = SM70_8x4_Row; using CLayout = SM70_8x8_32b; };
3.3 MMA_Atom
一个Atom包括MMAOperation和MMA_Traits,当调用一个Atom时,只需关注Traits的逻辑,Atom会自动处理Operation物理部分的细节,Atom是对单个硬件操作的定义,支持在多种硬件上工作,比如:单个线程、一个QP(Volta)、一个warp(Ampere)、一个warpgroup(Hopper),下面是两个构建MMA_Atom的例子
3.3.1 Volta
Volta架构下一组thread有8个,称为quadpair(QP),在例子中执行8×8×4MMATypes:
using ValTypeD = float;
using ValTypeA = half_t;
using ValTypeB = half_t;
using ValTypeC = float;Shape:using Shape_MNK = Shape <_8,_8,_4>;Thread_ID:using ThrID = Layout<Shape <_4, _2>, Stride<_1,_16>>;MMA的8个逻辑线程ID0~7↔映射↔QP的8个物理线程ID[0,1,2,3]∪[16,17,18,19]
用户视角下是0~7,但是物理上是1~3、16~19Accumulator Mapping(Layout):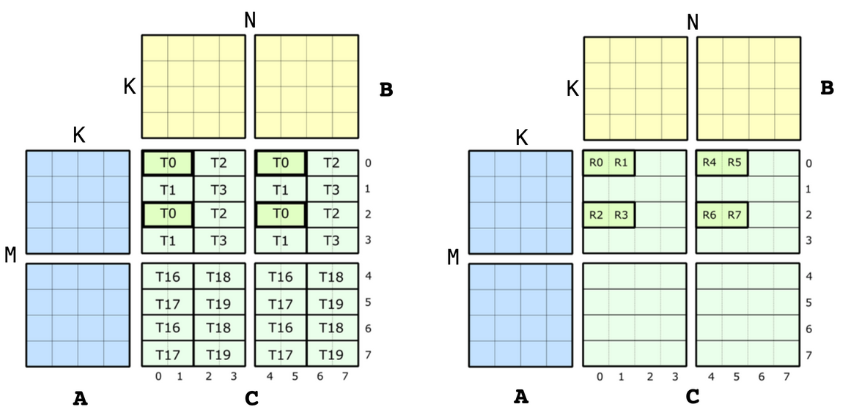
上图是SM70_F32F16F16F32的QP级别的试图,这种单一指令级视图的信息,就是我们需要在CuTe中编码的内容
C是F32 Accumulator,AB都是F16
3.3.1.1 Accumulator Mapping
CLayout需要建立(logic_thr_id, logic_val_id)和(m, n)坐标之间的映射,前者是逻辑id,是用户视角,后者是物理id,是硬件视角。CLayout包含shape和stride两部分,不难知道shape是8×8,但是stride还需要推导,过程中又需要分别对thread和stride分析
- thread
- 至于stride,使用
(m,n)的column-major做映射:(logic_thr_id, logic_val_id)→(m, n) == m + n * M,M=8- 对于thread来说,只需关注同一value下不同thread的坐标
- 从图中可以观察到有3个维度的跳变
(0,0)→(1,0)、(0,0)→(0,1)、(0,0)→(4,0),步长分别是1、16、4
- 此时shape也要变成三维的
(2,2,2),根据跳变的维度数就能得到
- 至于stride,使用
- value
- 同样的,关注同一thread下不同vaule的坐标
- 从图中可以观察到有3个维度的跳变
(0,0)→(0,1)、(0,0)→(2,0)、(0,0)→(0,4),步长分别是8、2、32
最终CLayout就是
此时当用户输入// (T8,V8) -> (m,n) using CLayout = Layout<Shape <Shape <_2, _2,_2>, Shape <_2,_2, _2>>, Stride<Stride<_1,_16,_4>, Stride<_8,_2,_32>>>;(tid, vid)时,就会对应相应的物理位置(m,n)
- 同样的,关注同一thread下不同vaule的坐标
如果C是F16的话,就没那么复杂,因为每个线程负责一行8个FP16(16B)
但是负责8个FP32(32B)时,硬件资源压力有点大,所以上面F32的要另作处理
using CLayout = Layout<Shape <_8,_8>, Stride<_1,_8>>;3.3.1.2 A and B Mapping
AB有两种布局,分别需要将(tid, vid)映射到(m, k)和(n, k)
先看TN布局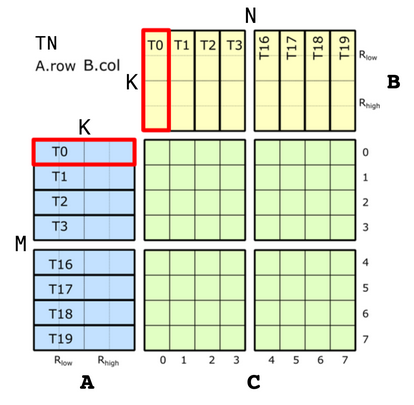
不难看出ALayout(m,k)是Shape<_8, _4>,Stride<_1,_8>,逻辑id和物理id关系为(m, k) == m + k * M
- 在M方向上,
(T0,V0)→(T0,V1)对应(0,0)→(0,1),对thread来说,stride为1 - 在K方向上,
(T0,V0)→(T1,V0)对应(0,0)→(1,0),对value来说,stride为第一列,8
BLayout(n,k)也是Shape<_8, _4>,Stride<_1,_8>,逻辑id和物理id关系为(n, k) == n + k * N - 在N方向上,
(T0,V0)→(T1,V0)对应(0,0)→(0,1),对thread来说,stride为1(n对应水平方向) - 在K方向上,
(0,0)→(1,0),对value来说,stride为第一列,8// (T8,V4) -> (m,k) using ALayout = Layout<Shape <_8,_4>, Stride<_1,_8>>;
然后看NT布局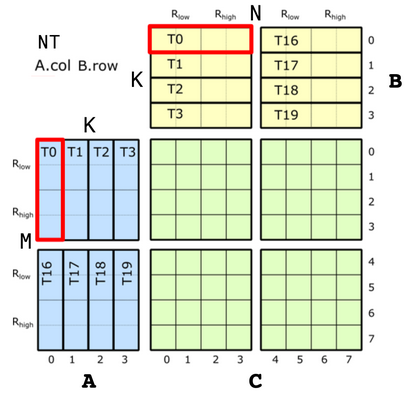
对于ALayout
- M维度:T0/T16块、V0~V3
- K维度:T0~T3/T16~T19
- 这里的4是逻辑的,对应的是物理上的T16
所以thread是二维的: (T0,V0)→(T1,V0)对应(0,0)→(0,1),stride1为第一整列,8;(T0,V0)→(T1,V1)对应(0,0)→(0,1),stride为半列,4
value也做相应的推导,不难得出ALayout如下
BLayout推导不再赘述// (T8,V4) -> (m,k) using ALayout = Layout<Shape <Shape <_4,_2>,_4>, Stride<Stride<_8,_4>,_1>>;
3.3.2 Hopper
这是SM90_64x128x16_F16F16F16F16_TN atom
A[64,16]、B[128,16]、CD[64,128]
3.3.2.1 Accumulator Mapping
首先看N方向,
- T0~T3,4个线程,
(T0,V0)到(T1,V0)的步长是前两列,2×64=128 - V0~V1,2个值,
(T0,V0)到(T0,V1)的步长是第一列,64
再看M方向,using CLayout = Layout<Shape <Shape < _4, ...>, Shape < _2, ...>>, Stride<Stride<_128, ...>, Stride<_64, ...>>>; - T0~T28,在8×8core matrix中(就是以左上角8×8为单位的),一行4个thread往下重复了8次 ,相邻两个线程,如
(T0,V0)、(T4,V0),相隔1using CLayout = Layout<Shape <Shape < _4, _8, ...>, Shape < _2, ...>>, Stride<Stride<_128, _1, ...>, Stride<_64, ...>>>; - V0~V2,相隔8;shape里填2,理解为上面的8×8matrix又复制了一遍
最后将这16×8matrix重复4次,using CLayout = Layout<Shape <Shape < _4, _8, ...>, Shape < _2, _2>>, Stride<Stride<_128, _1, ...>, Stride<_64, _8>>>;(T0,V0)与(T32,V0)相隔16
此时得到64×8的accumulators,GMMA构造其实是64×N,N可以取// (T128,V4) -> (M64,N8) using CLayout = Layout<Shape <Shape < _4, _8, _4>, Shape < _2, _2>>, Stride<Stride<_128, _1, _16>, Stride<_64, _8>>>;[16,32,64,128,256],只需要将64×8重复几次就好,比如,64×128的CLayout// (T128,V64) -> (M64,N128) using CLayout = Layout<Shape <Shape < _4, _8, _4>, Shape < _2, _2, _16>>, Stride<Stride<_128, _1, _16>, Stride<_64, _8, _512>>>; - 一整个64×8一共有32×8×2=512个,所以跨度是512
- 至于shape里的16,就是N/8得到的,这里的N是128
3.3.2.2 A and B Mapping
A、B完整且连续地存在SMEM里,所有的线程都指向整块数据地开头,所以可以直接按行主序/列主序存储数据,ALayout如下
然而,并没有找到关于using ALayout_64x16 = Layout<Shape <Shape < _4,_8, _4>,Shape < _2,_2, _2>>, Stride<Stride<_128,_1,_16>,Stride<_64,_8,_512>>>;BLayout_128x16或BLayout_16x128的定义
3.4 TiledMMA
上面已经将Atom构建好了,现在以Atom为单位,在MNK空间组织Atom
// CUTLASS3.4:
template <class MMA_Atom,
class AtomLayoutMNK = Layout<Shape<_1,_1,_1>>,
class PermutationMNK = Tile<Underscore,Underscore,Underscore>>
struct TiledMMA : MMA_Atom { ... }AtomLayoutMNK表示在MNK方向上分别重复几次Atom,这种重复会要求更多的执行线程PermutationMNK表示在
【Exp.1】
MMA_Atom mma = MMA_Atom<SM70_8x8x4_F32F16F16F32_NT>{}; print_latex(mma);
等价于
TiledMMA mma = make_tiled_mma(SM70_8x8x4_F32F16F16F32_NT{},
Layout<Shape<_1,_1,_1>>{}, // Layout of Atoms
Tile<_8,_8,_4>{}); // Tiler
print_latex(mma);组合多个MMA_Atom,布局是1×1×1,所以只用了一个原子
【Exp.2】用上面的4个MMA_Atom构建一个类似WMMA的对象,在warp内部,将一个Atom的计算模式复制到不同的线程组里(跨线程)
TiledMMA mma = make_tiled_mma(SM70_8x8x4_F32F16F16F32_NT{}, Layout<Shape <_2,_2>, Stride<_2,_1>>{}); // 2x2 n-major layout of Atoms
print_latex(mma);
C中的以
T4、T8、T12为首的这几组thread都是之前没用过的,出现了上面没有的一些线程,加上以T0为首的thread的这四组遵循(2,2):(2,1)布局
【Exp.3】将Tile扩大到32×32×4
TiledMMA mma = make_tiled_mma(SM70_8x8x4_F32F16F16F32_NT{}, Layout<Shape <_2,_2>, Stride<_2,_1>>{}, // 2x2 n-major layout of Atoms
Tile<_32,_32,_4>{}); // 32x32x4 tiler
print_latex(mma);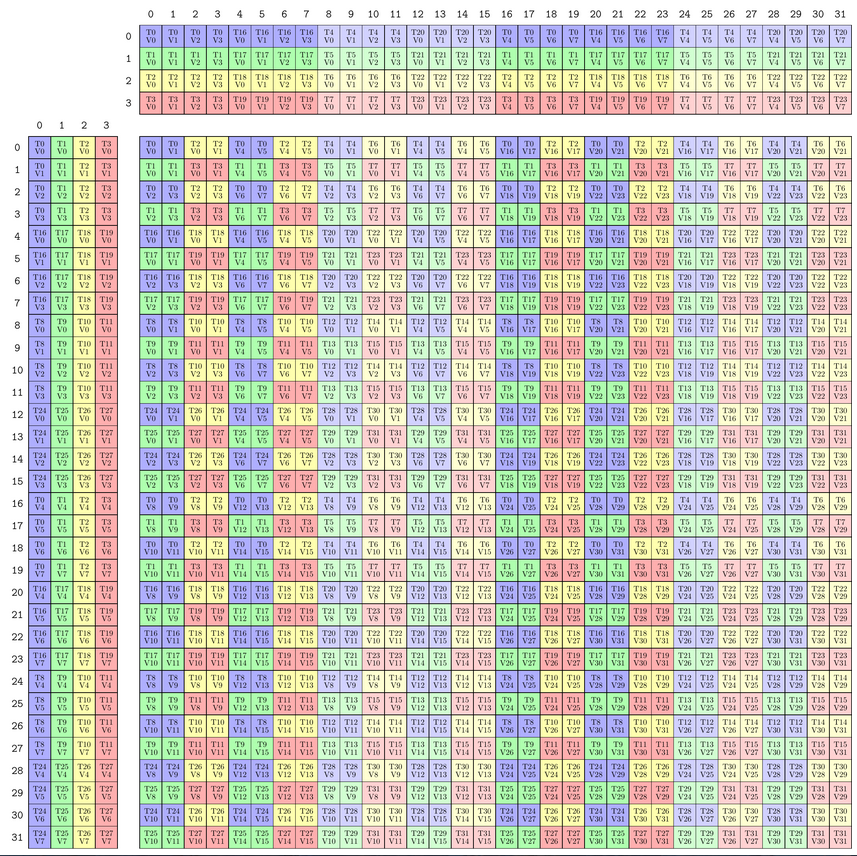
- 没有出现新的线程,是把上面的C复制了4份,放在左上、左下、右上、右下
- 出现了上面所有没有的(Tx, Vx)的组合
- 在一个block内部,将warp的计算模式复制到不同的tiles上(跨数值)
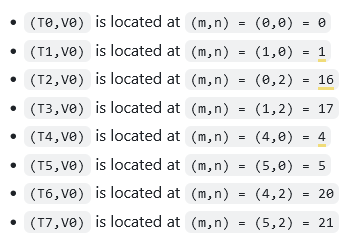
这时,列出A矩阵中T0负责的8个值,会发现T0V0到T0V4时,T0同时存在warp(0,0)和warp(1,0)中,会有合并内存访问的问题
T0V0 => ( 0,0)
T0V1 => ( 1,0)
T0V2 => ( 2,0)
T0V3 => ( 3,0)
T0V4 => (16,0)
T0V5 => (17,0)
T0V6 => (18,0)
T0V7 => (19,0)
于是改变Tile中的排布 - M:
Shape <_4,_4,_2>, Stride<_1,_8,_4> - N:
32 - K:
4
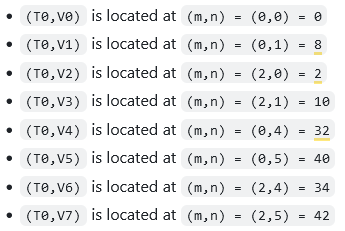
上面排布的改变在于更改TiledMMA mma = make_tiled_mma(SM70_8x8x4_F32F16F16F32_NT{}, Layout<Shape <_2,_2>, Stride<_2,_1>>{}, // 2x2 n-major layout of Atoms Tile<Layout<Shape <_4,_4,_2>, Stride<_1,_8,_4>>, // Permutation on M, size 32 _32, // Permutation on N, size 32 identity _4>{}); // Permutation on K, size 4 identity print_latex(mma);T0V0(0,0)与T0V3(0,0)、T16V0(4,0)、T0V4(16,0)的距离 T0V0~T0V3:shape4、stride1- (
T0V0~T0V3) ~ (T24V0~T24V3):shape4(有四个这样的V0~V3的块),stride8,这里的8就是让相邻两个块有8个跨度,T16V0距离T0V0有8个跨度 - (
T0V0~T24V3) ~ (T0V4~T24V7):shape2,相邻只有4个跨度,那么就刚好是T0的V0到V7按顺序排列了



