1 Image Classification
一张100x100pixels的图片其实是一个3D-tensor:
①图片的高100②图片的宽100③3 channelsRGB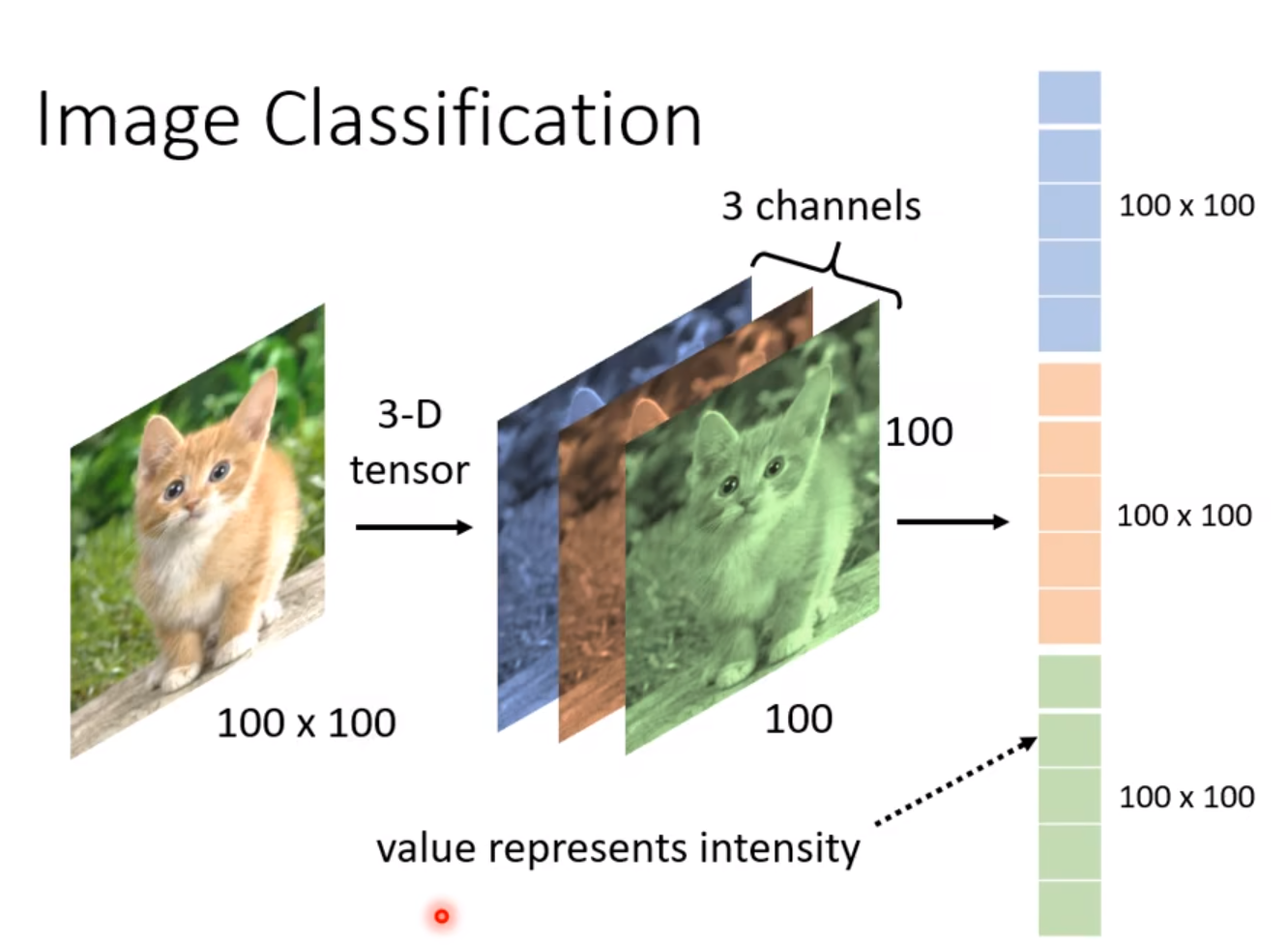
每一个数值代表某一个颜色某一个pixel的强度
2 Image Feature Observation
2.1 Observation 1
- Identifying some critical patterns
比如说一只鸟,只用看鸟嘴、眼睛和脚也能大致辨认出来
A neuron does not have to see the whole image Simplification
设定一个区域为Receptive field,每一个neuron只关心自己的Receptive field。
Receptive field can be overlapped
neuron can have the same receptive field
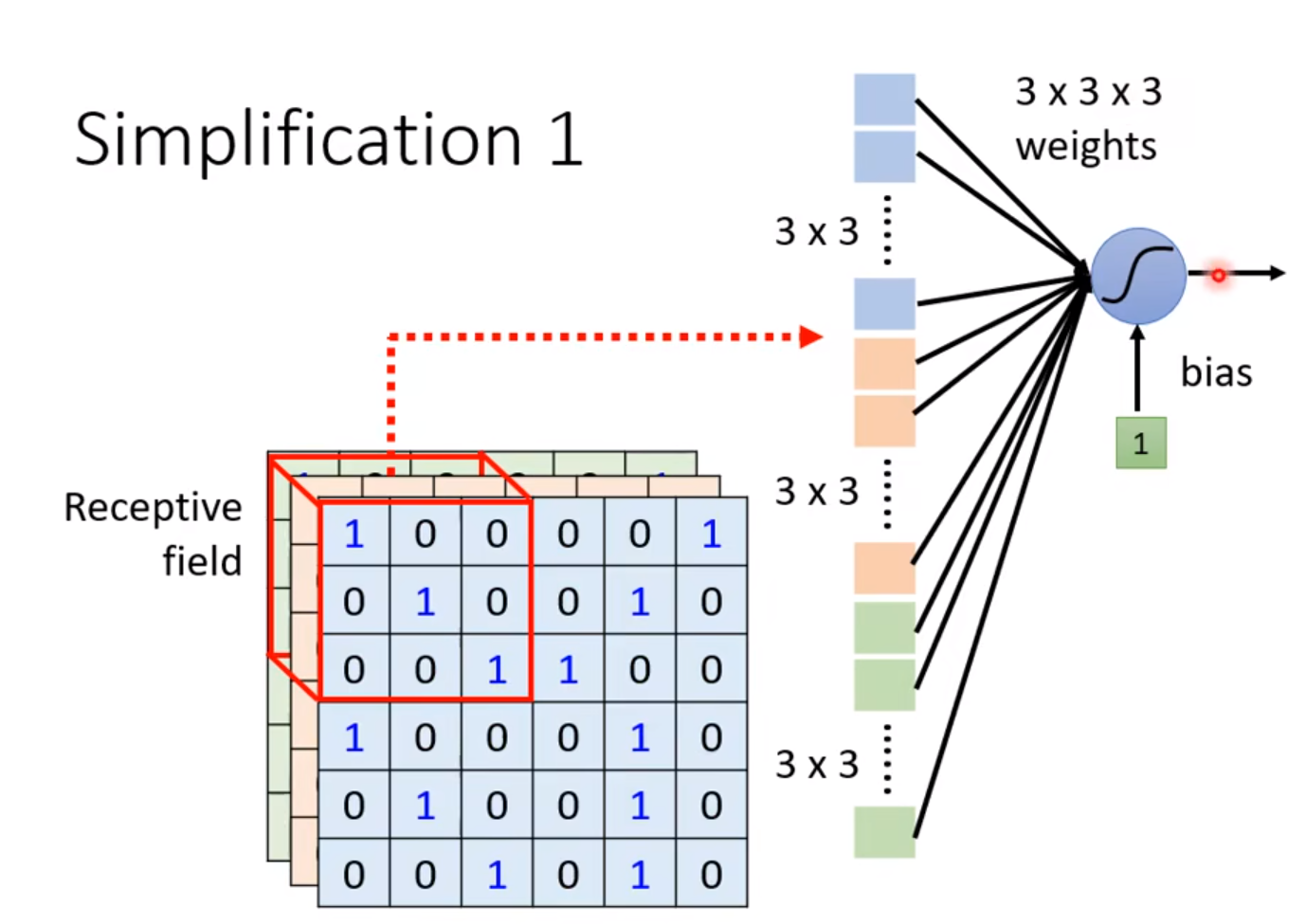
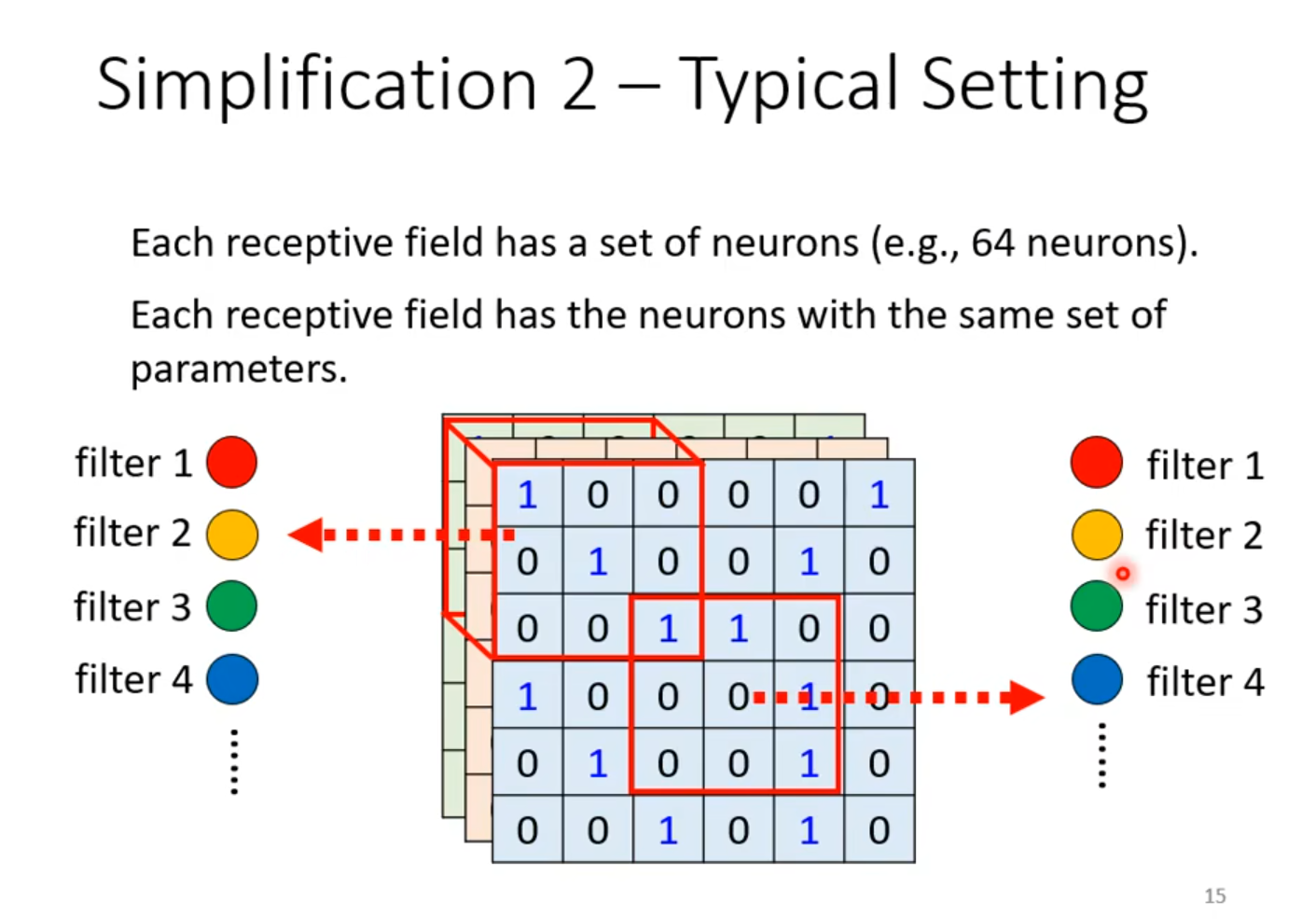
Simplification 1-Typical Setting
- The same patterns appear in different regions
👇solution: parameter sharing线条代表weight,相同颜色代表weight一样,守备的receptive field不一样,参数一样,因为输入不一样,所以输出也不一样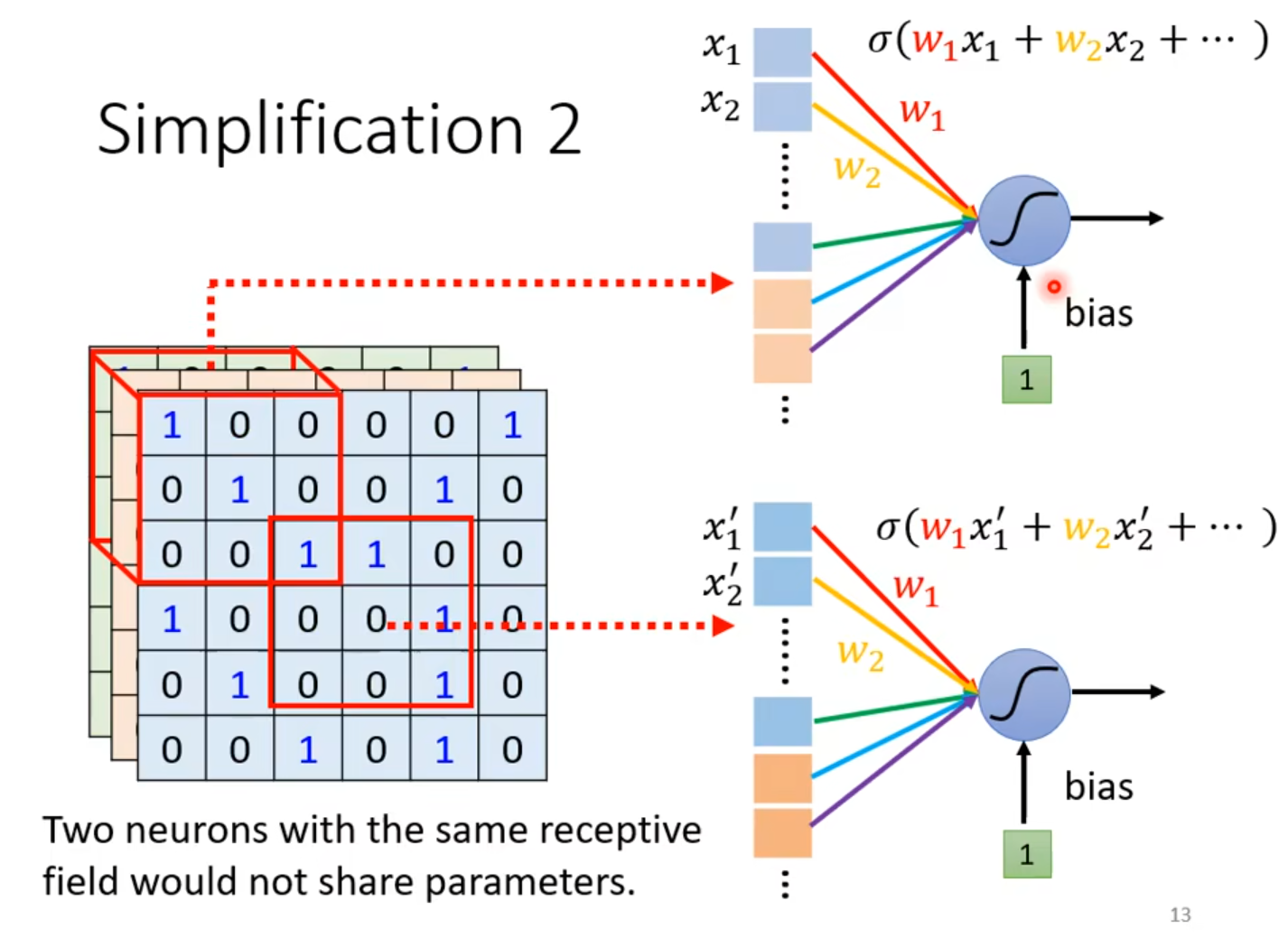
- Simplification 2-Typical Setting
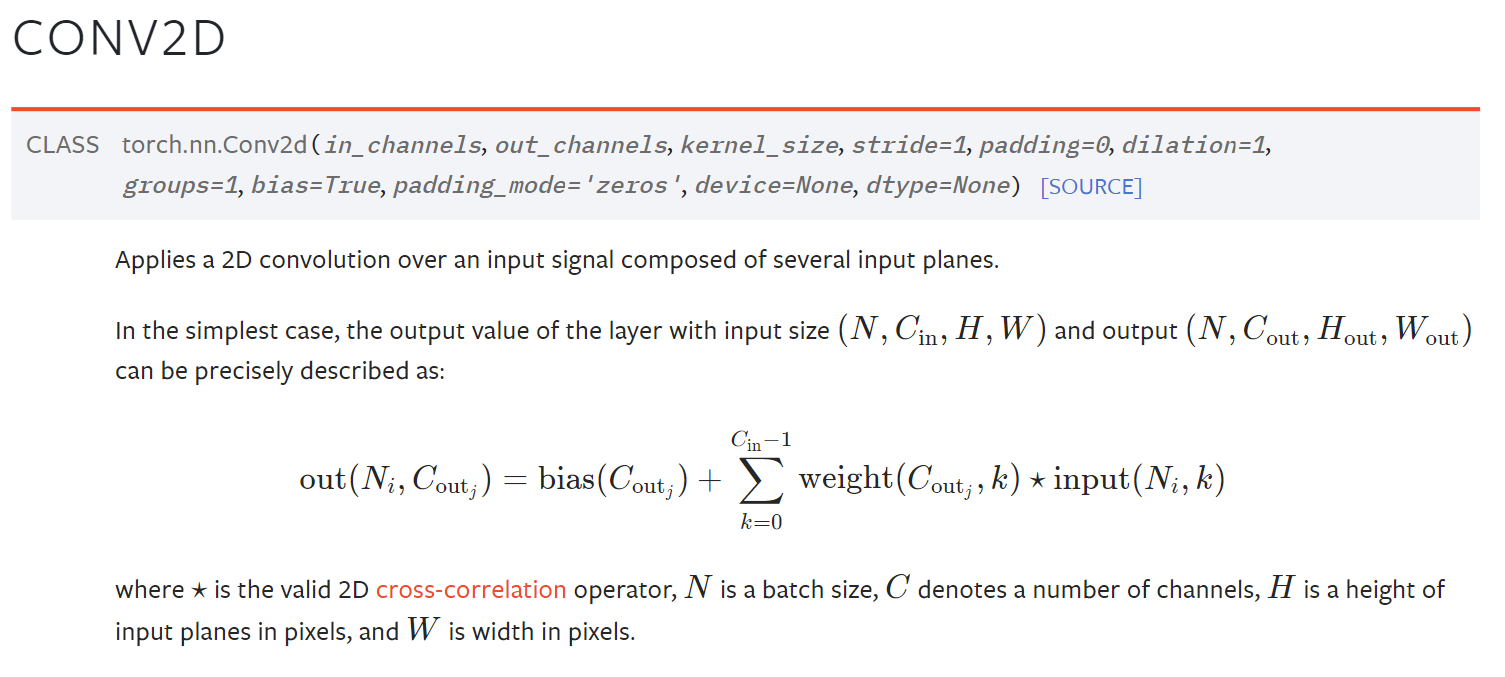
3 Benefit of Convolutional Layer
Fully Connected Layer不需要看整个图片,只需要重要的pattern👉receptive field某一些neurons一定要一摸一样👉parameter sharingreceptive field+parameter sharing=convolutional layer,虽然会有较大的model bias,但是convolutional layer是专门为影像设计的,所以用在image上偏差不会很大- 用
convolutional layer的network叫做CNN
4 Multiple Convolutional Layers
- n个filters可形成feature map with n channels
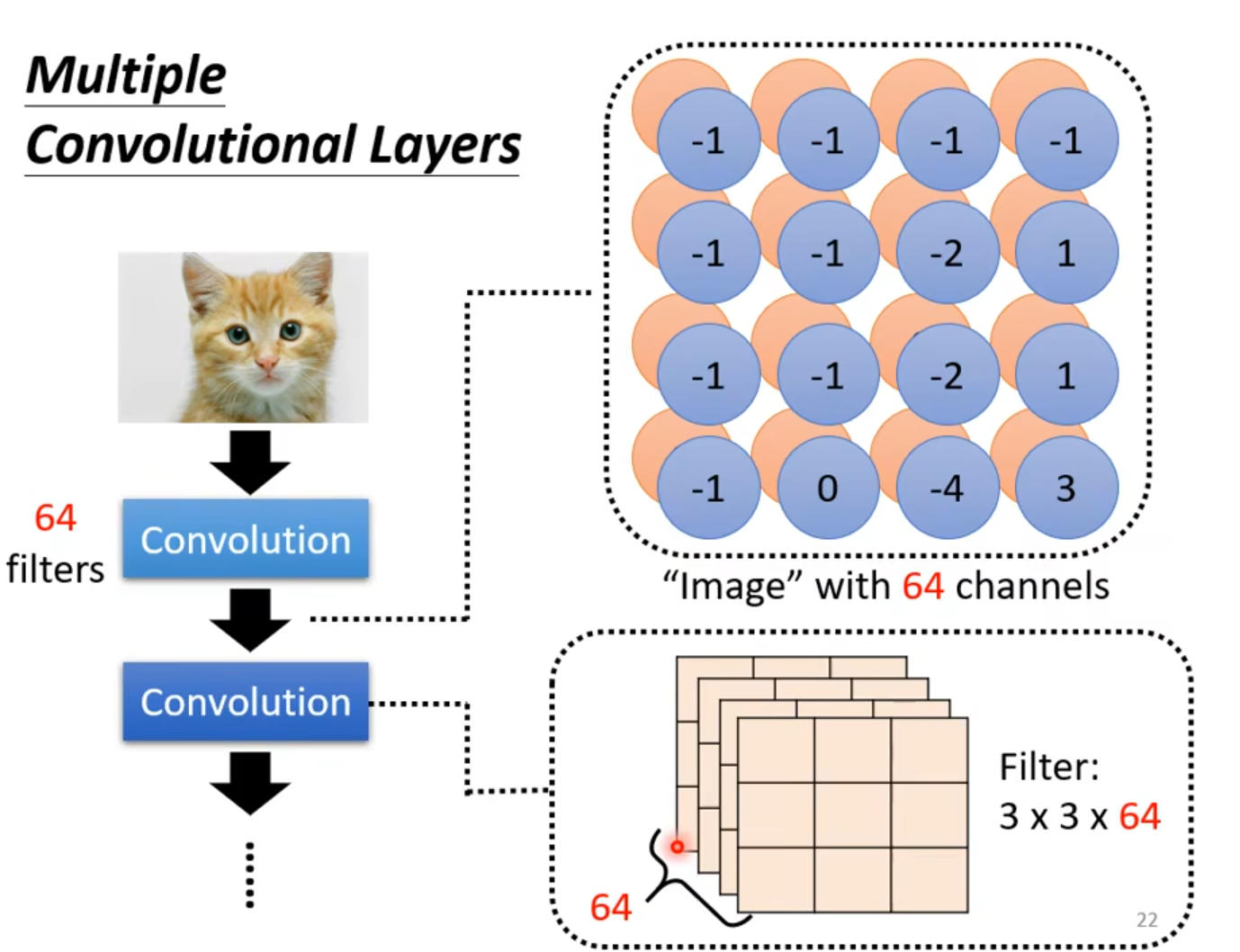
- 先是将
RGB图片放入convolution里,假设有64个filter(每个filter都是3x3x3),那么就会得到一个 feature map(可以看作是一个新的图片,只是他的channels有64个) - 再把feature map放入convolution里,filter的大小为:3x3x64(filter的高度就是它要处理的image的channel)
- 先是将
- filter比较小的情况下也能让network看比较大范围的pattern
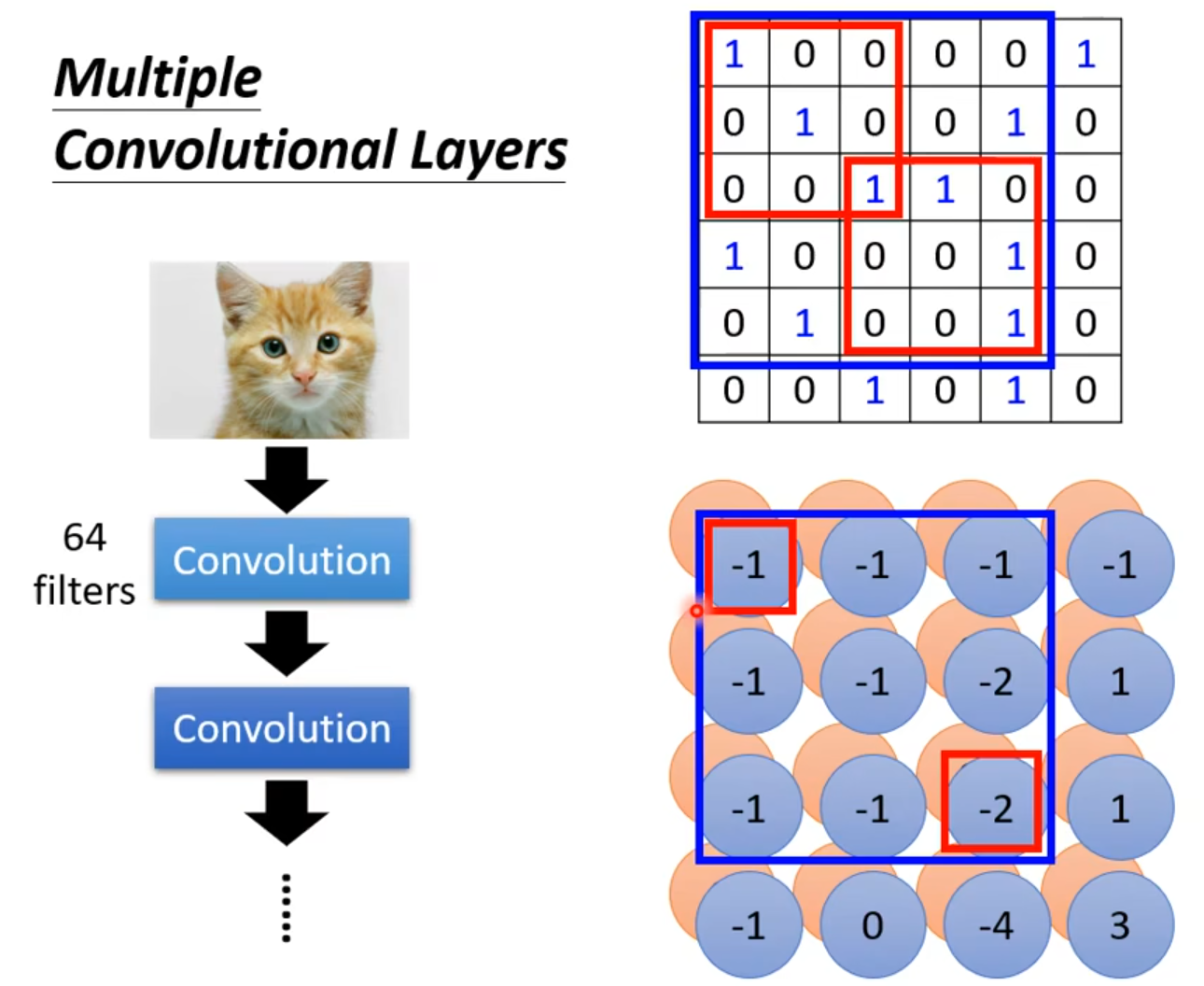
右下角蓝色圆圈的是其中一个filter,右上角是image,image左上角红色框对应filter左上角红色框,image右下角红色框对应filter右下角红色框。feature map的3x3对应image的5x5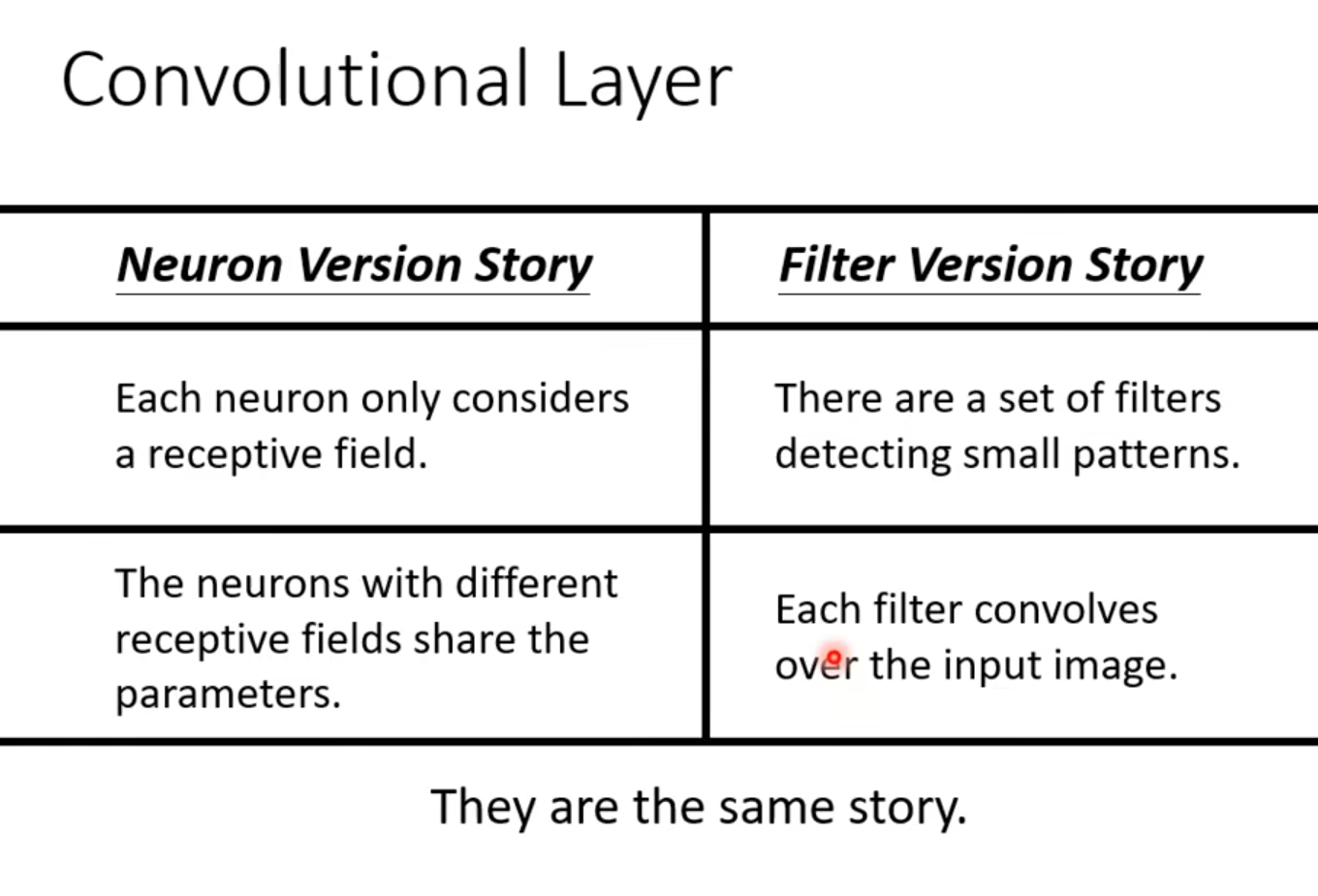
5 Pooling - Max Pooling
在feature map中,n x n个数字一组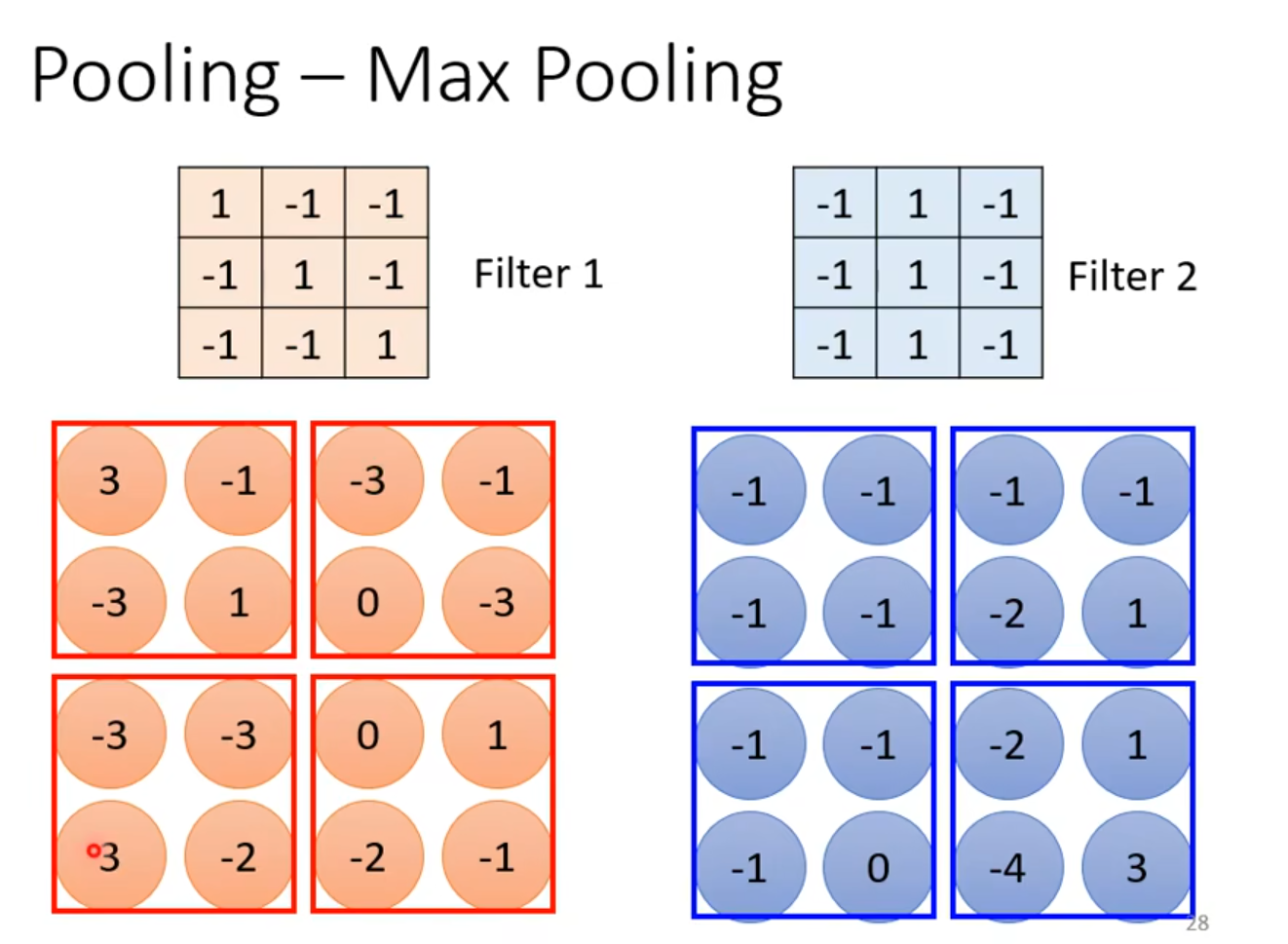 👉
👉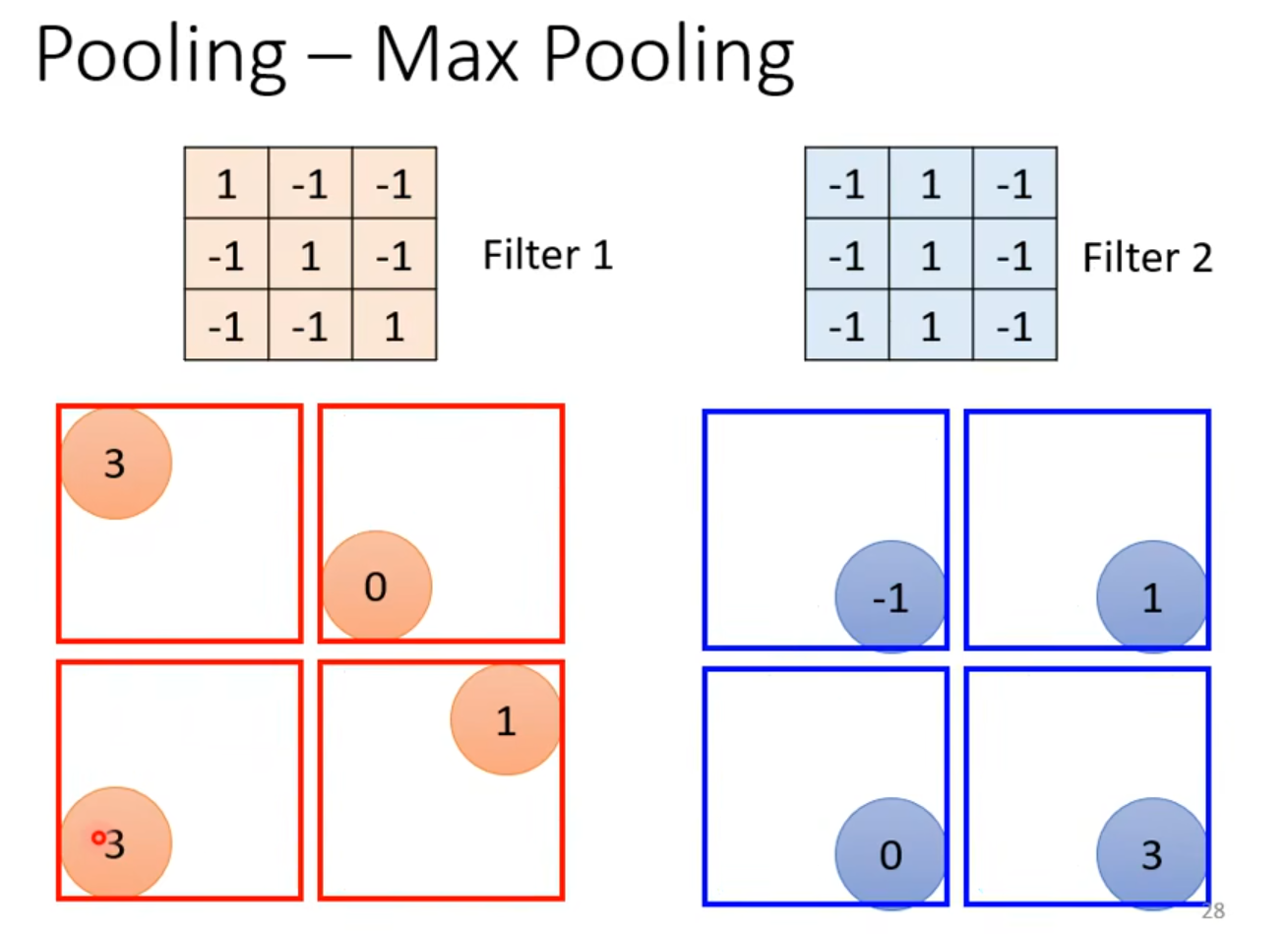
max pooling就是选一组里最大的那个数
做完convolution之后通常会搭配pooling,pooling不改变channels,但是改变长宽
6 The whole CNN
Flatten:将pooling的output本来矩阵的样子拉直
7 Application: Playing Go
- Alpha Go uses 5x5 for first layer,可能是5x5的范围比较重要
- 同样可能存在相同的patters在不同的regions里
- 不用pooling
8 实操
8.1 Code
import torchvision.transforms as transforms
image_data = ... # Your image data here
# Applying the transformations
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])
transformed_data = transform(image_data)
8.2 原理
9 Advanced CNN
- 当训练次数过多时会发生过拟合,因此并不是训练次数越多模型准确度越高
- 解决梯度消失(过拟合),使用Residual net
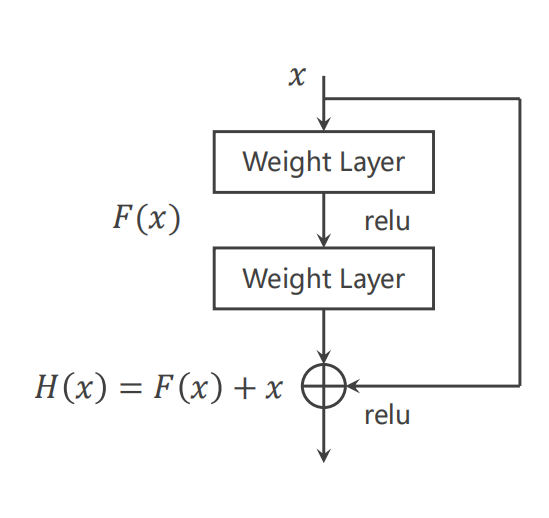
$z=H(x)$
$\dfrac{\partial z}{x}=\dfrac{\partial F(x)}{\partial x} + \dfrac{\partial x}{\partial x}=\dfrac{\partial F(x)}{\partial x}+1$
梯度=$\dfrac{\partial L}{\partial z}\times\dfrac{\partial z}{\partial x}$
当$\dfrac{\partial F}{\partial x}$很小的时候,$\dfrac{\partial z}{\partial x}$不会在0的附近